Seven(by)Five Tessellations
Expandable kinematic surfaces from computational geometry
- Supervisor
- Prof. Erik Demaine, MIT CSAIL; Chuck Hoberman
- Team
- Phillip Ewing, Anirudh Sharma, Georgios Samartzopoulos
Concept
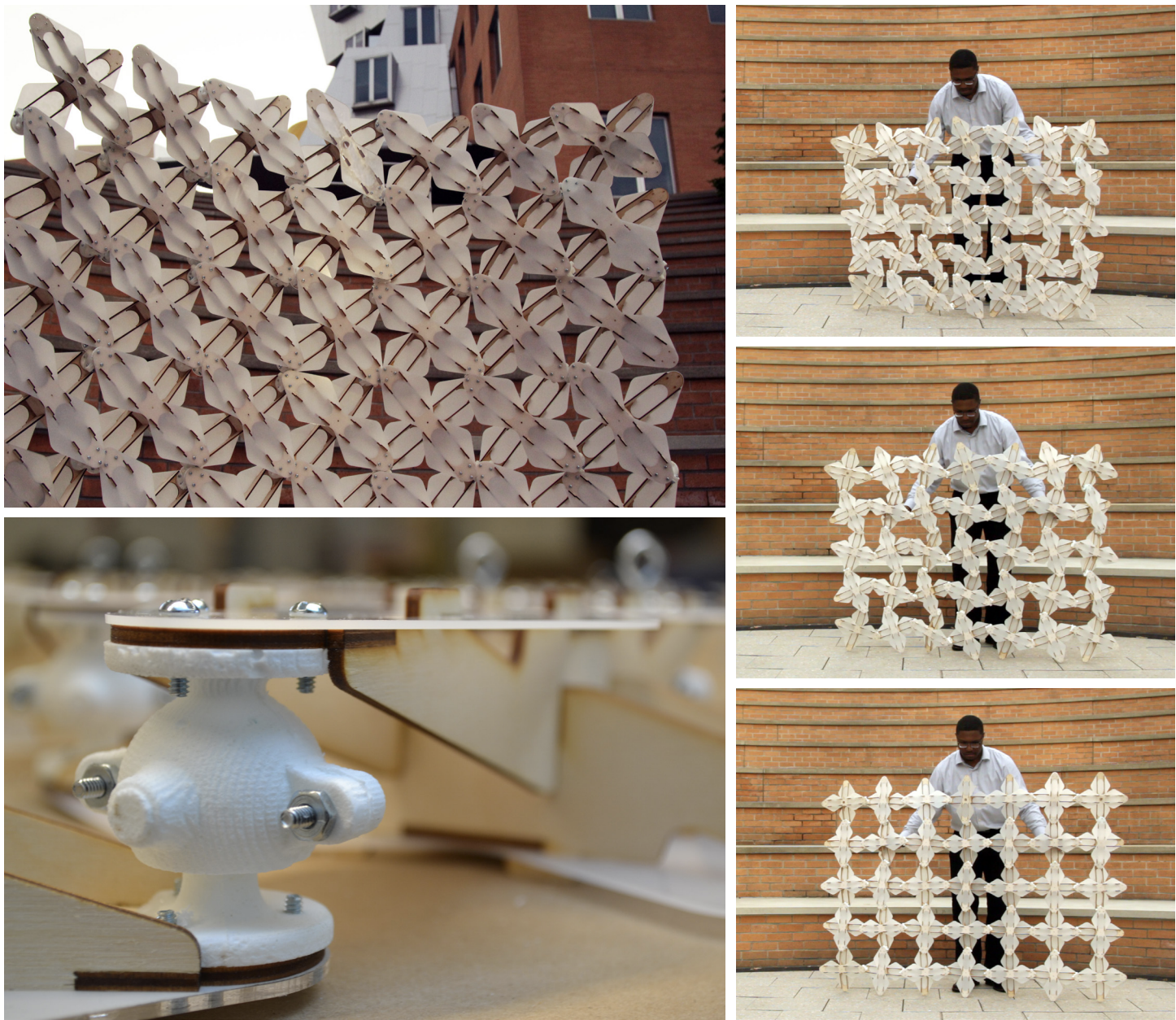
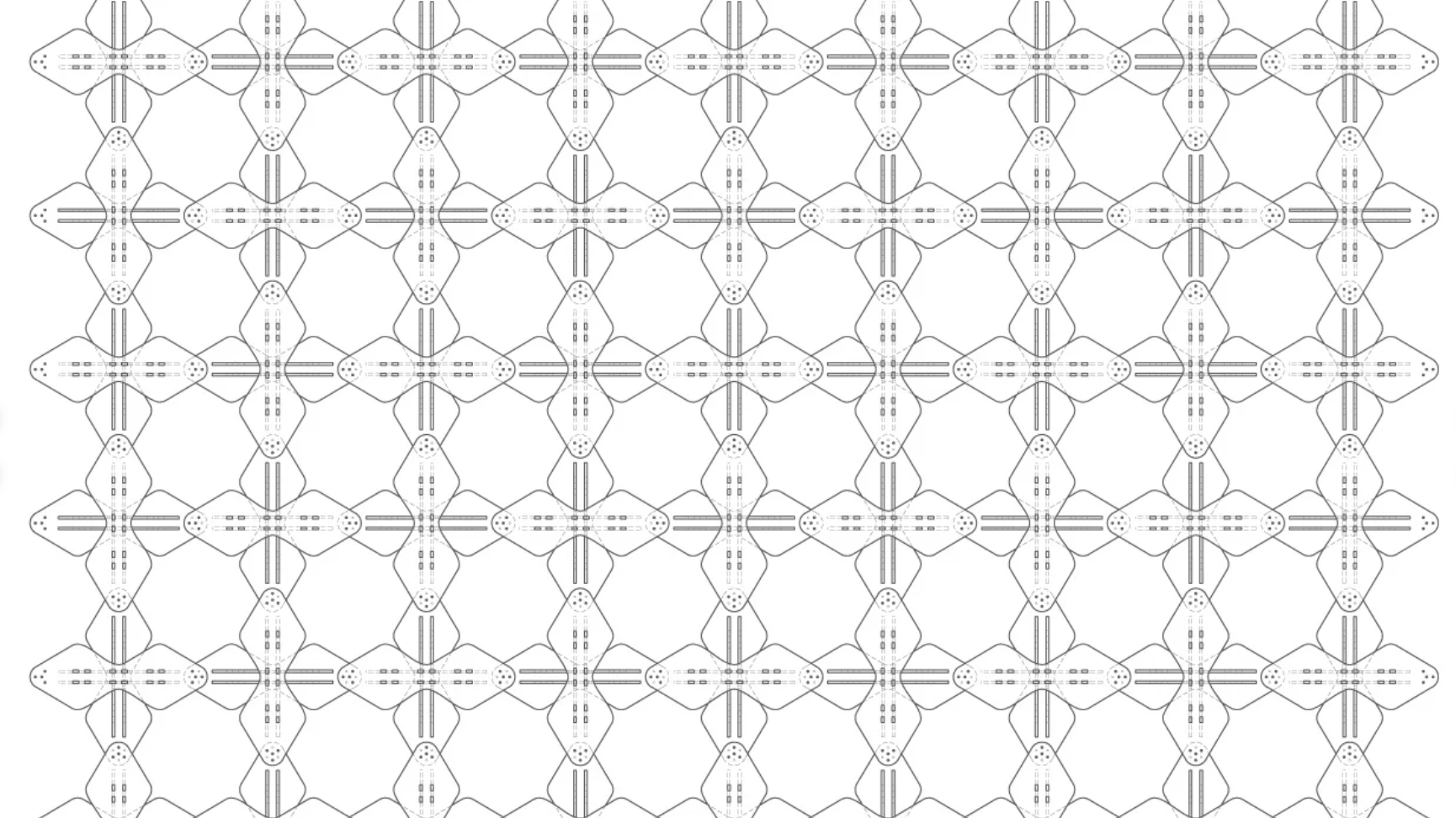
This speculative prototype is based on an expandable Cartesian grid linkage system invented by Chuck Hoberman. Seven(by)Five incorporates ball-and-socket joints between linkage members to allow for single-curvature out-of-plane bending, allowing the system to take on self-supporting configurations. As the system is actuated, the varying densities of the prototype’s shading “petals” modulate light and porosity. Further, Seven(by)Five aims to serve as a mechanical scaffold for other environment-adapting features.
Design
The design is for an interactive transformable surface that can bend out of plane and scale at the same time. The surface can be applied as a building facade skin or an interior space partition and can interact with various stimuli such as temperature, air, and light. The interactive surface can augment the acoustic experience of a space, or control lighting, by changing its geometry and permeability. Sensors placed on the surface detect external stimuli, and mechanical parts force the surface to transform accordingly.
Fabrication
The prototype fabrication focused on the design of the ball-and-socket joints which connect the parts together and allow for specific degrees of freedom. We applied molding and casting techniques using liquid plastics to create the joints. The petal material is PVC together with plywood. We hand-cast approximately 800 components over a period of five days and motorized the assembly.
